Embassy Preempt RTOS 技术报告
1. 引言
1.1 项目背景
本项目基于原有的Embassy Preempt RTOS进行重构和扩展。原项目虽然具备基本的实时调度功能,但在架构设计上存在以下限制:
- 单一平台依赖: 原代码与ARM Cortex-M架构紧密耦合,难以扩展到其他处理器架构
- 模块耦合度高: 各功能模块间边界不清晰,依赖关系复杂
- 硬件抽象不足: 缺乏统一的硬件抽象层,平台特定代码散布在各个模块中
- 可维护性差: 代码结构不够清晰,难以进行二次开发和功能扩展
1.2 项目目标
基于上述背景,在阅读代码的过程中我定了以下目标:
- 设计跨平台的嵌入式RTOS: 支持ARM Cortex-M和RISC-V等多种主流微控制器架构
- 实现高可扩展性的模块化架构: 通过模块化设计降低耦合度,提升代码可维护性
- 建立统一的硬件抽象层: 为不同平台提供一致的编程接口
- 保持零成本抽象: 在提供抽象的同时不牺牲运行时性能
- 完善异步编程模型: 在嵌入式环境中高效应用Rust的async/await机制
2. 系统架构设计
2.1 整体架构重构:从单体到模块化
2.1.1 项目拆分的根本原因
原架构问题分析: 原有的Embassy Preempt项目采用了相对单一的整体架构,主要存在以下问题:
平台耦合度过高
- ARM Cortex-M特定代码(如PendSV中断、NVIC配置)直接嵌入在核心调度逻辑中
- 硬件相关代码与业务逻辑混杂,难以进行架构无关的单元测试
- 扩展到新架构需要修改核心代码,违背开闭原则
模块边界不清晰
- 调度器、内存管理、外设驱动等模块间存在循环依赖
- 缺乏清晰的接口定义,模块间直接访问内部实现
- 代码复用性差,功能重复实现
可维护性不足
- 修改一个功能可能影响多个不相关的模块
- 新功能添加困难,需要考虑对现有架构的影响
- 调试和问题定位复杂,错误传播路径不清晰
拆分策略与设计原则:
基于以上问题,我采用了以下模块化重构方案:
// 重构前:平台相关代码散布在调度器中
#[no_mangle]
pub unsafe extern "C" fn PendSV_Handler() {
// ARM特定的寄存器操作与调度逻辑混合
asm!(
"MRS R0, PSP",
"STMDB R0!, {{R4-R11}}",
// ... 大量ARM特定汇编代码
);
// 调度逻辑
if high_ready_task != current_task {
// 任务切换逻辑
}
// 上下文切换代码
}
// 重构后:通过平台抽象层分离
pub fn trigger_context_switch() {
get_platform_trait().trigger_context_switch(); // 平台无关调用
}
// 平台实现中处理硬件特定逻辑
impl Platform for Stm32Platform {
fn trigger_context_switch(&'static self) {
const NVIC_INT_CTRL: u32 = 0xE000ED04;
const NVIC_PENDSVSET: u32 = 0x10000000;
unsafe {
asm!("STR R1, [R0]",
in("r0") NVIC_INT_CTRL,
in("r1") NVIC_PENDSVSET);
}
}
}核心设计原则:
- 单一职责原则: 每个模块只负责一个明确的功能领域
- 依赖倒置原则: 高层模块不依赖低层模块,都依赖抽象
- 接口隔离原则: 客户端不应依赖它不需要的接口
- 零成本抽象: 编译时抽象,运行时无额外开销
2.1.2 新模块化架构
重构后的模块化架构实现了清晰的职责分离:
embassy-preempt/
├── embassy-preempt-executor # 执行器核心 - 平台无关的调度逻辑
├── embassy-preempt-platform # 平台抽象层 - 硬件抽象与驱动集成
├── embassy-preempt-macros # 统一入口宏 - 跨平台入口点抽象
├── embassy-preempt-log # 独立日志系统
├── embassy-preempt-mem # 内存管理 - 内存布局与分配策略
├── embassy-preempt-event # 事件同步系统
├── embassy-preempt-structs # 基础数据结构 - 跨模块共享的数据类型
└── embassy-preempt-cfg # 配置管理 - 编译时配置系统模块依赖关系重构:
重构前后的依赖关系对比:
优化前: 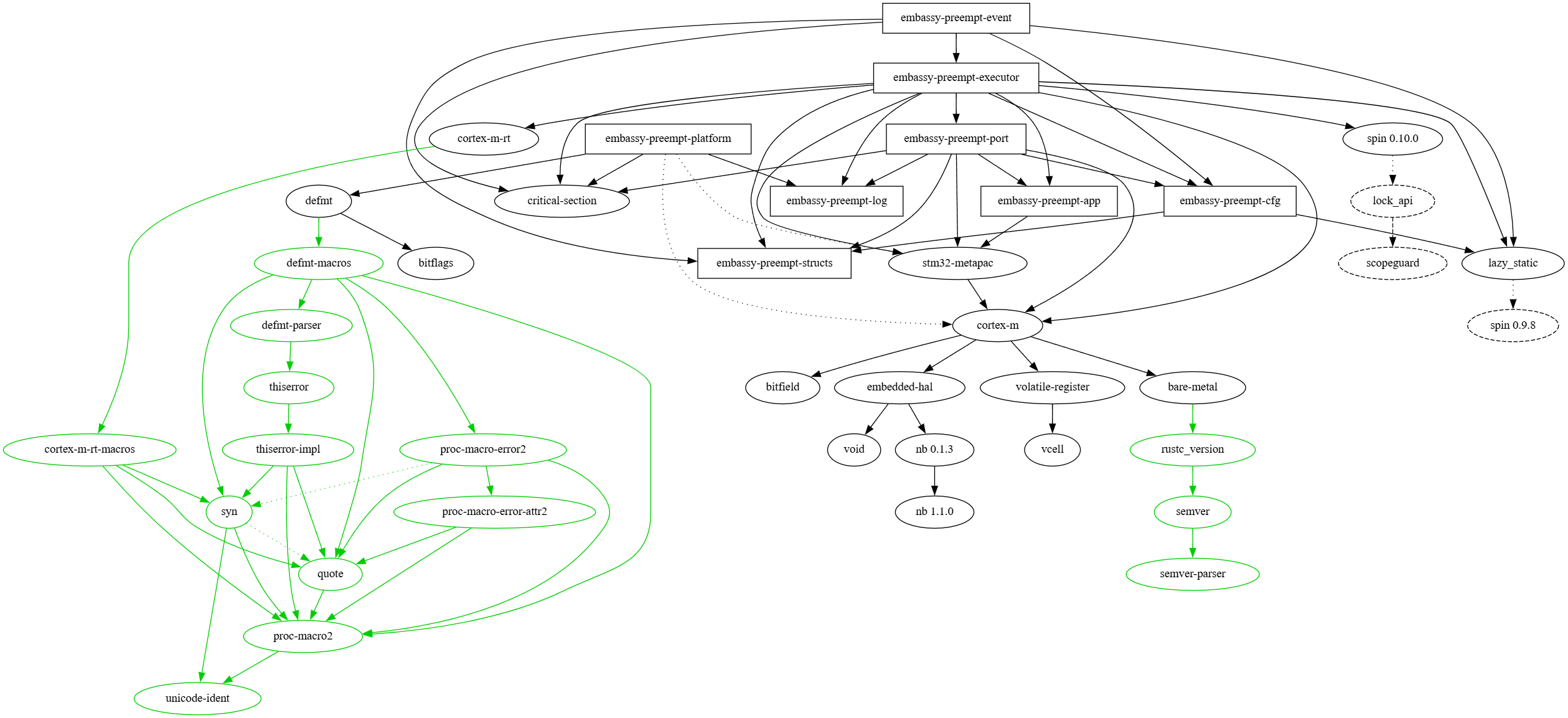 优化后:
优化后: 
依赖关系优化:
- executor模块: 完全平台无关,仅依赖Platform trait
- platform模块: 包含所有平台特定代码,向上提供统一接口
2.2 平台抽象层架构设计
2.2.1 Platform Trait核心设计
平台抽象层的核心是Platform trait,它定义了RTOS所需的硬件操作接口:
// modules/embassy-preempt-platform/src/traits/platform.rs
pub trait Platform {
type OsStk; // 平台特定的栈类型
// 核心RTOS操作 - 平台无关接口
fn trigger_context_switch(&'static self);
fn set_program_stack_pointer(&'static self, sp: *mut u8);
fn configure_interrupt_stack(&'static self, interrupt_stack: *mut u8);
fn init_task_stack(&'static self, stk_ref: NonNull<Self::OsStk>, executor_function: fn()) -> NonNull<Self::OsStk>;
fn enter_idle_state(&'static self);
fn shutdown(&'static self);
// 上下文管理 - 强制内联
#[inline(always)]
unsafe fn save_task_context(&'static self);
#[inline(always)]
unsafe fn restore_task_context(&'static self, stack_pointer: *mut usize, interrupt_stack: *mut usize, return_value: u32);
#[inline(always)]
unsafe fn get_current_stack_pointer(&'static self) -> *mut usize;
// 定时器驱动访问 - 异步调度基础
fn get_timer_driver(&'static self) -> &'static dyn crate::traits::timer::Driver;
}设计特点分析:
关联类型设计:
type OsStk允许不同平台定义不同的栈指针类型生命周期参数:
&'static self确保平台实例在程序整个生命周期内有效,支持全局单例模式性能优化: 性能关键的方法标记
#[inline(always)],确保零成本抽象类型擦除: 返回trait对象 (
&dyn Driver) 实现类型安全的运行时多态
2.2.2 双重访问模式设计
为了平衡类型安全和灵活性,平台抽象层提供了两种不同的访问模式:
// modules/embassy-preempt-platform/src/lib.rs
use spin::Once;
static __PLATFORM: Once<chip::PlatformImpl> = Once::new();
// 方法一:具体类型访问 - 用于平台特定代码
pub fn get_platform() -> &'static chip::PlatformImpl {
__PLATFORM.call_once(|| chip::PlatformImpl::new())
}
// 方法二:trait对象访问 - 用于平台无关代码
pub fn get_platform_trait() -> &'static dyn Platform<OsStk = OsStk> {
__PLATFORM.call_once(|| chip::PlatformImpl::new()) as &dyn Platform<OsStk = OsStk>
}两种访问模式的区别与适用场景:
| 访问方式 | 返回类型 | 适用场景 | 好处 | 限制 |
|---|---|---|---|---|
get_platform() | &'static chip::PlatformImpl | 平台特定代码、驱动开发 | 访问平台特有功能、编译时优化 | 跨平台兼容性差 |
get_platform_trait() | &'static dyn Platform<OsStk = OsStk> | 由系统代码调用,仅使用trait中的方法 | 跨平台兼容、类型安全 | 运行时开销、无法访问平台特有功能 |
实现原理:
- 懒初始化: 使用
spin::Once确保平台实例只初始化一次 - 类型转换: trait对象访问时进行类型擦除,牺牲少量性能换取跨平台兼容性
- 编译时优化: 具体类型访问时编译器可以进行完整的优化
2.2.3 多平台支持策略
编译时平台选择与统一接口:
Platform库通过pub use机制提供了强大的多平台支持,实现了路径导出的通用化:
// modules/embassy-preempt-platform/src/lib.rs
// 编译时平台选择 - 核心机制
#[cfg(feature = "stm32f401re")]
pub use arch::chip::stm32f401re as chip;
#[cfg(all(target_arch = "riscv32", feature = "qingke"))]
pub use arch::chip::ch32v208 as chip;
#[cfg(not(any(feature = "stm32f401re", feature = "qingke")))]
compile_error!("No platform selected. Use feature flags to specify target platform.");统一接口设计原理:
pub use语句将特定平台的实现重新导出为统一的外部接口,实现了路径导出的通用化:
- 用户代码路径统一: 应用程序始终使用
chip::和arch::路径访问平台特定功能 - 编译时自动选择: Rust编译器根据feature标志选择具体的平台实现
- 类型安全保证: 在编译时就能确保平台兼容性,避免运行时错误
编译后的实际路径映射:
根据不同的feature标志,编译器会将chip::路径映射到具体平台:
// 当编译时启用 stm32f401re feature:
// chip::PlatformImpl 实际解析为 arch::chip::stm32f401re::PlatformImpl
// 当编译时启用 qingke feature:
// chip::PlatformImpl 实际解析为 arch::chip::ch32v208::PlatformImpl扩展性设计:
这种pub use机制具有良好的扩展性,添加新平台只需:
// 在lib.rs中添加新的平台支持
#[cfg(feature = "esp32")]
pub use arch::chip::esp32 as chip;
// 用户通过feature标志选择平台
// embassy-preempt-platform = { features = ["esp32"] }架构特定代码隔离:
src/
├── arm/ # ARM Cortex-M实现
│ ├── chip/ # 芯片特定实现
│ │ └── stm32f401re/
│ │ ├── platform.rs # Platform trait实现
│ │ ├── timer_driver.rs
│ │ └── ucstk.rs # ARM栈上下文
│ └── driver/ # ARM特定驱动
├── riscv/ # RISC-V实现(占位符)
│ ├── chip/
│ └── driver/
└── traits/ # 平台无关trait定义驱动模型标准化:
// 统一的定时器驱动trait
pub trait TimerDriver {
fn now(&self) -> u64;
unsafe fn allocate_alarm(&self) -> Option<AlarmHandle>;
fn set_alarm_callback(&self, alarm: AlarmHandle, callback: fn(*mut ()), ctx: *mut ());
fn set_alarm(&self, alarm: AlarmHandle, timestamp: u64) -> bool;
unsafe fn on_interrupt(&self);
}
// 平台特定实现
impl TimerDriver for RtcDriver {
fn now(&self) -> u64 {
// STM32 RTC硬件特定实现
// ....
}
}2.2.4 驱动与PlatformImpl对象的关系设计
驱动集成模式的核心思想:
PlatformImpl作为驱动的容器和协调者,负责:
- 驱动生命周期管理: 初始化、配置和销毁驱动实例
STM32F401RE平台的具体实现:
// modules/embassy-preempt-platform/src/arm/chip/stm32f401re/platform.rs
pub struct PlatformImpl {
// 驱动实例 - 通过Mutex保证线程安全
pub timer: RtcDriver,
pub button: RefCell<ButtonDriver>, // 可借用访问
pub led: RefCell<LedDriver>, // 可借用访问
}
impl PlatformImpl {
pub fn new() -> Self {
// 初始化HAL实例
let mut peripherals = Peripherals::take().unwrap();
let mut core_peripherals = CorePeripherals::take().unwrap();
// 初始化时钟系统
let rcc = peripherals.RCC.constrain();
let clocks = rcc
.cfgr
.use_hse(25.MHz())
.sysclk(84.MHz())
.freeze();
// 创建驱动实例
let timer = RtcDriver::new(&peripherals.RTC, &clocks);
let button = ButtonDriver::new(peripherals.PC13);
let led = LedDriver::new(peripherals.PA5);
PlatformImpl {
timer,
button: RefCell::new(button),
led: RefCell::new(led),
}
}
}中断处理与驱动协作:
// 中断处理程序中的驱动访问
#[cortex_m_rt::interrupt]
pub fn EXTI15_10() {
critical_section::with(|cs| {
// 通过平台实例访问具体驱动
let platform = embassy_preempt_platform::get_platform();
let mut button = platform.button.borrow_mut(cs);
// 处理按钮中断
if button.handle_interrupt() {
// 如果按钮被按下,唤醒等待的任务
button.wake_waiting_task();
}
});
}
// 异步按钮驱动实现
impl ButtonDriver {
pub fn wait_for_press(&self) -> impl Future<Output = ()> + '_ {
struct ButtonWait<'a> {
driver: &'a ButtonDriver,
}
impl Future for ButtonWait<'_> {
type Output = ();
fn poll(self: Pin<&mut Self>, cx: &mut Context<'_>) -> Poll<Self::Output> {
if self.driver.is_pressed() {
Poll::Ready(())
} else {
// 注册waker,等待中断唤醒
self.driver.register_waker(cx.waker());
Poll::Pending
}
}
}
ButtonWait { driver: self }
}
}驱动层次结构设计:
2.3 统一入口宏设计
2.3.1 跨平台entry宏实现
设计动机: 原有的项目直接使用cortex_m_rt::entry宏,这导致了ARM架构特定的依赖。为了实现真正的跨平台支持需要一个架构无关的入口点抽象。
宏实现原理:
// modules/embassy-preempt-macros/src/lib.rs
#[proc_macro_attribute]
pub fn entry(_args: TokenStream, input: TokenStream) -> TokenStream {
let expanded = quote::quote! {
// ARM Cortex-M平台
#[cfg(target_arch = "arm")]
#[cortex_m_rt::entry]
#input
// RISC-V平台 (QingKe内核)
#[cfg(all(target_arch = "riscv32", feature = "qingke"))]
#[qingke_rt::entry]
#input
// 其他架构报错
#[cfg(not(any(target_arch = "arm", all(target_arch = "riscv32", feature = "qingke"))))]
compile_error!("Unsupported target architecture for embassy-preempt");
};
expanded.into()
}使用示例:
// 用户代码 - 架构无关的入口点
#[embassy_preempt_macros::entry]
fn main() -> ! {
// 初始化RTOS
OSInit();
// 创建应用任务
create_user_tasks();
// 启动调度器
OSStart();
}
// 编译时根据目标架构展开为对应的特定入口宏
// ARM平台编译后等效于:
// #[cortex_m_rt::entry]
// fn main() -> ! { ... }
// RISC-V平台编译后等效于:
// #[qingke_rt::entry]
// fn main() -> ! { ... }编译时平台选择机制:
通过Rust的条件编译系统,在编译时根据目标架构和feature标志选择合适的入口宏:
# Cargo.toml配置示例
[features]
default = ["stm32f401re"]
stm32f401re = []
ch32v208 = ["qingke"]
qingke = ["qingke-rt"]3. 技术实现
3.1 内存管理系统优化
3.1.1 栈布局优化设计
栈溢出保护机制:
通过将程序栈放置在中断栈下方,当程序栈溢出时会首先破坏中断栈,这会导致系统崩溃而不是静默的数据破坏,提高了系统的可调试性:
// 栈保护验证
impl Platform for PlatformImpl {
fn configure_interrupt_stack(&'static self, interrupt_stack: *mut u8) {
// 验证栈地址有效性
let stack_limit = interrupt_stack as usize - self.config.interrupt_stack_size;
unsafe {
// 设置MSP(主栈指针)用于中断处理
asm!("msr MSP, {}", in(reg) interrupt_stack);
// 栈边界检查(可选,用于调试)
if cfg!(debug_assertions) {
assert!(stack_limit > 0x20000000, "Stack overflow detected");
}
}
}
}Todo: 在未来实现定期的栈溢出检查,这个想法来源于一次opt-level=0的痛苦栈溢出调试。
3.1.2 内存配置统一化
platform库统一提供memory.x:
// modules/embassy-preempt-platform/build.rs
use std::env;
use std::fs;
use std::path::PathBuf;
fn main() {
let out_dir = env::var_os("OUT_DIR").unwrap();
let dest_path = PathBuf::from(out_dir).join("memory.x");
// 根据feature生成对应的memory.x
let memory_content = if cfg!(feature = "stm32f401re") {
include_str!("arm/chip/stm32f401re/memory.x")
} else if cfg!(feature = "ch32v208") {
include_str!("riscv/chip/ch32v208/memory.x")
} else {
panic!("Unsupported platform: no memory configuration available");
};
fs::write(&dest_path, memory_content).unwrap();
println!("cargo:rustc-link-search={}", out_dir);
// 通知cargo重新编译
println!("cargo:rerun-if-changed=build.rs");
}3.2 HAL库集成与驱动重构
3.2.1 外设驱动异步化
异步使用示例:
// 应用层使用异步按钮驱动
#[embassy_preempt_macros::entry]
async fn task1(_args: *mut c_void) {
loop {
critical_section::with(|cs| get_platform().led.borrow(cs).toggle());
task_log!(info, "waiting for button");
wait_for_button().await;
task_log!(info, "button pressed");
}
}3.3 开发工具链优化
3.3.1 依赖管理优化
性能优化措施:
在开发过程中,我对项目依赖进行了全面优化,主要改进包括:
删除lazystatic依赖:
toml# 优化前 lazy_static = { version = "1.4", features = ["spin_no_std"] } # 优化后 spin = "0.10.0"统一spin版本:
- 使用
spin::Once替代lazy_static::lazy_static - 减少编译时开销和运行时内存占用
- 消除lazy_static版本过老,编译系统内同时存在
spin0.10.0和spin0.9.8的问题
- 使用
defmt依赖解耦:
rust// modules/embassy-preempt-log/src/lib.rs #[cfg(feature = "defmt")] use defmt::{debug, error, info, warn}; #[cfg(not(feature = "defmt"))] macro_rules! info { ($($arg:tt)*) => {}; }
4. 跨平台适配实践
4.1 开源工具链贡献
probe-rs集成:
为CH32V208系列芯片开发了完整的烧录算法,并成功集成到probe-rs工具链中:
// flash-algorithms/ch32v208/src/lib.rs
const FLASH_KEY1: u32 = 0x45670123;
const FLASH_KEY2: u32 = 0xCDEF89AB;
const ERASE_TIMEOUT: u32 = 0xF00000;
algorithm!(Algorithm, {
device_name: "ch32v208",
device_type: DeviceType::Onchip,
flash_address: 0x0000_0000,
flash_size: 0x10000,
page_size: 0x100,
// Note: This is not correct, each erased word looks like: 0xe339e339
empty_value: 0x39,
program_time_out: 1000,
erase_time_out: 2000,
sectors: [{
size: 0x8000,
address: 0x0000000,
}]
});VSCode调试支持:
基于probe-rs的调试支持,实现了VSCode中CH32V208的完整调试环境:
// .vscode/launch.json
{
"version": "0.2.0",
"configurations": [
{
"preLaunchTask": "${defaultBuildTask}",
"type": "probe-rs-debug",
"request": "launch",
"name": "CH32V208 Debug",
"flashingConfig": {
"flashingEnabled": true
},
"chip": "CH32V208",
"coreConfigs": [
{
"programBinary": "target/riscv32imac-unknown-none-elf/debug/ch32v208-blinky"
}
]
}
]
}5 博客系统搭建
VitePress技术文档:
搭建了基于VitePress的技术博客系统:
// blogs/.vitepress/config.mts
export default withMermaid(withSidebar(
defineConfig({
title: "Embassy Preempt 博客",
description: "基于 Rust 的嵌入式异步实时操作系统技术博客",
themeConfig: {
// https://vitepress.dev/reference/default-theme-config
nav: [
{ text: '首页', link: '/' },
{ text: '技术报告', link: '/技术报告/' },
{ text: '周报', link: '/周报-Oveln/' },
{ text: '项目计划', link: '/项目计划/项目计划-20251111'}
],
socialLinks: [
{ icon: 'github', link: 'https://github.com/Oveln/embassy_preempt' }
]
}
}),
{
// 侧边栏配置
excludeByGlobPattern: ['node_modules/**', '.vitepress/**', 'public/**'],
// sortMenusOrderByDescending: true, // 从新到旧排序
sortMenusByFrontmatterDate: true,
useTitleFromFrontmatter: true // 从 frontmatter 获取标题
}
))自动化部署:
通过GitHub Actions实现了博客的自动化部署:
# .github/workflows/deploy-blog.yml
jobs:
build-and-deploy:
runs-on: ubuntu-latest
if: github.ref == 'refs/heads/main'
steps:
- name: Checkout
uses: actions/checkout@v4
with:
fetch-depth: 0
token: ${{ secrets.GITHUB_TOKEN }}
- name: Setup Bun
uses: oven-sh/setup-bun@v2
with:
bun-version: latest
- name: Install dependencies
working-directory: ./blogs
run: bun install
- name: Build VitePress site
working-directory: ./blogs
run: bun run build
- name: Deploy to blog branch
uses: peaceiris/actions-gh-pages@v4
with:
github_token: ${{ secrets.GITHUB_TOKEN }}
publish_dir: ./blogs/.vitepress/dist
publish_branch: blog
force_orphan: true6. 结论与展望
6.1 成果总结
经过四周的迭代开发,成功实现了以下核心目标:
- 完整的模块化架构: 将原单体项目重构为8个独立模块,实现了清晰的职责分离
- 跨平台抽象层: 建立了完善的Platform Trait抽象,支持ARM Cortex-M和RISC-V架构
- 零成本抽象: 通过编译时优化,确保抽象层不引入运行时性能损失
- 统一的开发体验: 提供了跨平台的entry宏和统一的驱动接口
6.2 创新点总结
平台抽象层设计:
- 双重访问模式(
get_platform()和get_platform_trait())平衡了类型安全和灵活性 - PlatformImpl作为驱动容器,实现了资源的统一管理
- 编译时平台选择,运行时零开销
开源工具链贡献:
- 为CH32V208系列芯片开发了完整的probe-rs支持
- 贡献了烧录算法和调试功能,推动了RISC-V嵌入式生态发展
6.3 经验教训
架构设计的重要性:
- 前期的架构规划对项目的可维护性和扩展性至关重要
- 模块化设计应该遵循单一职责和依赖倒置原则
- 抽象层设计需要平衡灵活性和性能